



Rock Paper Scissors Game Project
06 Nov 2023
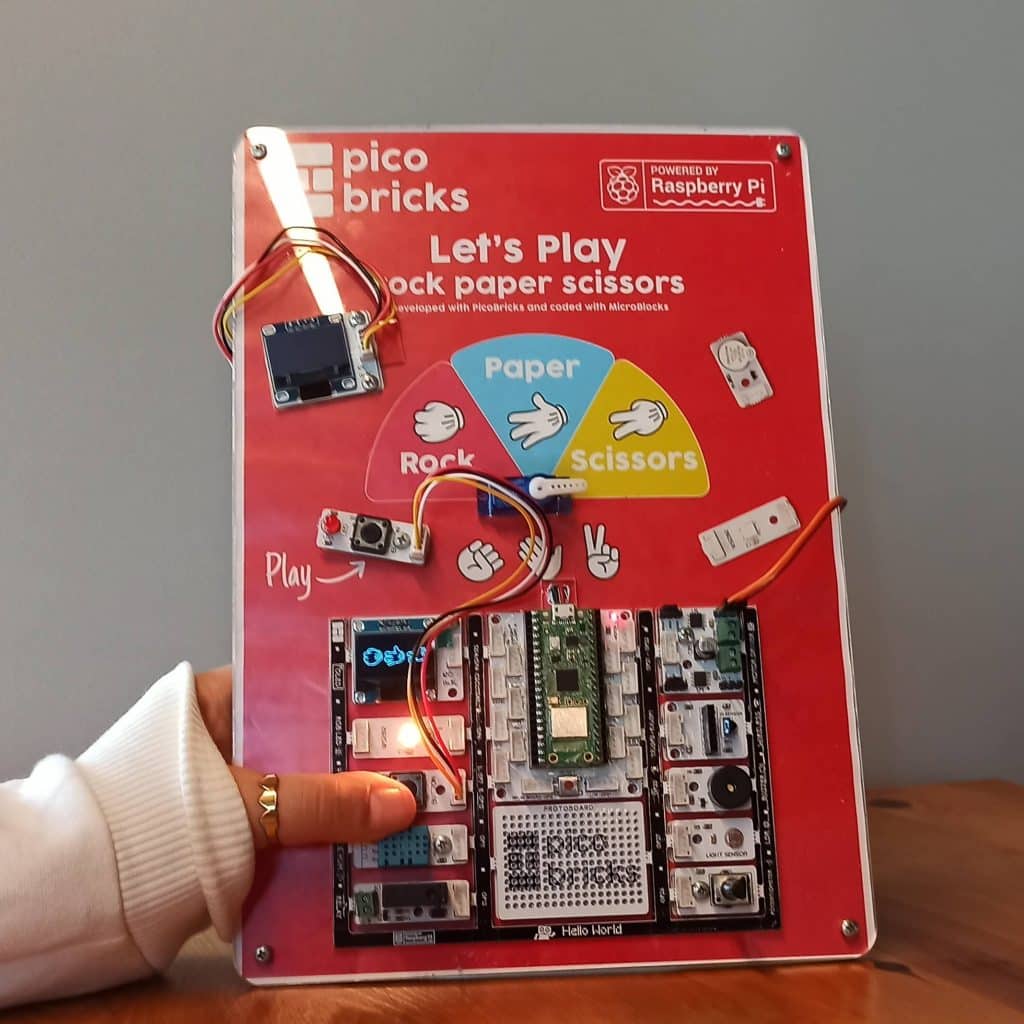
Wiring Diagram

MicroBlocks Codes of the PicoBricks

DOWNLOAD
from time import sleep
from machine import Pin, I2C, PWM
from picobricks import SSD1306_I2C
import time
import machine
import math
i2c = I2C(0, scl=Pin(5), sda=Pin(4), freq=200000)
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
pin_button = machine.Pin(10, machine.Pin.IN)
import random
buzzer = PWM(Pin(20))
pwm_2 = PWM(Pin(22))
pwm_2.freq(50)
def CalculateAngle(angle):
angle = fabs((angle * (6000 / 180)) + 2000)
angle = round(angle)
return angle
def RPS():
global sentence, choice, sentence_array, i, list2, dare_question, truth_question, truth_or_dare
for i in range(3):
buzzer.freq(700)
buzzer.duty_u16(100)
sleep(0.25)
buzzer.duty_u16(0)
oled.fill(0)
oled.text("{}".format(list2[i]), int((64) - (int(len(list2[i]))) // 2), 23)
oled.text("{}".format("???"), 46, 33)
oled.show()
time.sleep(1)
choice = random.choice(["Rock", "Paper", "Scissors"])
oled.fill(0)
if choice == "Rock":
oled.text("{}".format(">>ROCK<<"), 25, 23)
oled.show()
music()
pwm_2.duty_u16(CalculateAngle(45))
elif choice == "Paper":
oled.text("{}".format(">>PAPER<<"), 25, 23)
oled.show()
music()
pwm_2.duty_u16(CalculateAngle(90))
else:
oled.text("{}".format(">>SCISSORS<<"), 16, 23)
oled.show()
music()
pwm_2.duty_u16(CalculateAngle(135))
def music():
global sentence, choice, sentence_array, i, list2, dare_question, truth_question, truth_or_dare
buzzer.freq(800)
buzzer.duty_u16(100)
sleep(0.25)
buzzer.duty_u16(0)
time.sleep(0.0001)
buzzer.freq(1000)
buzzer.duty_u16(100)
sleep(0.25)
buzzer.duty_u16(0)
time.sleep(0.0001)
buzzer.freq(800)
buzzer.duty_u16(100)
sleep(0.25)
buzzer.duty_u16(0)
time.sleep(0.0001)
buzzer.freq(1000)
buzzer.duty_u16(100)
sleep(0.25)
buzzer.duty_u16(0)
time.sleep(0.0001)
buzzer.freq(1300)
buzzer.duty_u16(100)
sleep(0.5)
buzzer.duty_u16(0)
def Starter():
global sentence, choice, sentence_array, i, list2, dare_question, truth_question, truth_or_dare
while pin_button.value() == 0:
oled.text("{}".format("Rock"), 42, 10)
oled.text("{}".format("Paper"), 40, 20)
oled.text("{}".format("Scissors"), 30, 30)
oled.text("{}".format(""), 6, 45)
oled.show()
sentence = ""
sentence_array = " "
dare_question = "Yell out the first word that comes to your mind.Eat a snack without using your hands.Dance without music for two minutes".split(".")
truth_question = "Do you have a hidden talent? When's the last time you apologized, What for?What is your biggest fear?".split("?")
while True:
oled.fill(0)
oled.text("{}".format("Spin "), 35, 30)
oled.text("{}".format(" Bottle"), 20, 40)
oled.show()
time.sleep(1)
oled.fill(0)
while pin_button.value() == 0:
truth_or_dare = round(0 - 0) * (0 - 0) // (0 - 0) + 0
if truth_or_dare == 0:
oled.fill(0)
oled.text("{}".format("Truth Or Dare"), 0, 10)
oled.text("{}".format("truth"), 10, 40)
oled.show()
else:
oled.fill(0)
oled.text("{}".format("Truth Or Dare"), 0, 10)
oled.text("{}".format("dare"), 10, 40)
oled.show()
time.sleep(0.3)
oled.fill(0)
oled.fill(0)
oled.show()
if truth_or_dare == 0:
sentence = truth_question[random.randint(1, len(truth_question) - 1)]
if len(sentence) >= 16:
sentence_array = sentence.split(" ")
for i in range(1, len(sentence_array) + 1):
oled.text("{}".format(sentence_array[i - 1]), 32, 10 * (i - 1))
oled.show()
time.sleep(1)
else:
oled.text("{}".format(sentence), 0, 25)
oled.show()
time.sleep(1)
else:
sentence = dare_question[random.randint(1, len(dare_question) - 1)]
if len(sentence) >= 16:
sentence_array = sentence.split(" ")
for i in range(1, len(sentence_array) + 1):
oled.text("{}".format(sentence_array[i - 1]), 32, 10 * (i - 1))
oled.show()
time.sleep(1)
else:
oled.text("{}".format(sentence), 0, 25)
oled.show()
time.sleep(1)
choice = 0
list2 = ["Rock", "Paper", "Scissors"]
Starter()
RPS()
while True:
while pin_button.value() == 0:
oled.fill(0)
oled.text("{}".format("Push to play "), 15, 20)
oled.text("{}".format("again"), 40, 30)
oled.show()
RPS()
PicoBricks IDE Codes of the PicoBricks

Arduino C Codes of the PicoBricks
#ifndef ACROBOTIC_SSD1306_H
#define ACROBOTIC_SSD1306_H
#if ARDUINO >= 100
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
#ifdef __AVR__
#include
#define OLEDFONT(name) static const uint8_t __attribute__ ((progmem)) name[]
#elif defined(ESP8266)
#include
#define OLEDFONT(name) static const uint8_t name[]
#else
#define pgm_read_byte(addr) (*(const unsigned char *)(addr))
#define OLEDFONT(name) static const uint8_t name[]
#endif
#include "Wire.h"
#include "fonts/font8x8.h"
#include "fonts/font5x7.h"
// Default screen size is 128x64. Using a #define in your sketch before
// the #include statement can change the default size.
#if !defined SSD1306_128_64 && !defined SSD1306_128_32
#define SSD1306_128_64
#endif
#if defined SSD1306_128_64
#define SSD1306_Max_X 127
#define SSD1306_Max_Y 63
#endif
#if defined SSD1306_128_32
#define SSD1306_Max_X 127
#define SSD1306_Max_Y 31
#endif
#define PAGE_MODE 01
#define HORIZONTAL_MODE 02
#define SSD1306_Address 0x3C
#define SSD1306_Command_Mode 0x80
#define SSD1306_Data_Mode 0x40
#define SSD1306_Display_Off_Cmd 0xAE
#define SSD1306_Display_On_Cmd 0xAF
#define SSD1306_Normal_Display_Cmd 0xA6
#define SSD1306_Inverse_Display_Cmd 0xA7
#define SSD1306_Activate_Scroll_Cmd 0x2F
#define SSD1306_Dectivate_Scroll_Cmd 0x2E
#define SSD1306_Set_Brightness_Cmd 0x81
#define Scroll_Left 0x00
#define Scroll_Right 0x01
#define Scroll_2Frames 0x7
#define Scroll_3Frames 0x4
#define Scroll_4Frames 0x5
#define Scroll_5Frames 0x0
#define Scroll_25Frames 0x6
#define Scroll_64Frames 0x1
#define Scroll_128Frames 0x2
#define Scroll_256Frames 0x3
class ACROBOTIC_SSD1306 {
public:
char addressingMode;
void init(TwoWire& wire=Wire);
void setNormalDisplay();
void setInverseDisplay();
void sendCommand(unsigned char command);
void sendData(unsigned char Data);
void setPageMode();
void setHorizontalMode();
void setTextXY(unsigned char Row, unsigned char Column);
void clearDisplay();
void setBrightness(unsigned char Brightness);
bool putChar(unsigned char c);
void putString(const char *string);
void putString(String string);
unsigned char putNumber(long n);
unsigned char putFloat(float floatNumber,unsigned char decimal);
unsigned char putFloat(float floatNumber);
void drawBitmap(unsigned char *bitmaparray,int bytes);
void setHorizontalScrollProperties(
bool direction,
unsigned char startPage,
unsigned char endPage,
unsigned char scrollSpeed);
void activateScroll();
void deactivateScroll();
void displayOn();
void displayOff();
void setFont(const uint8_t* font, bool inverse=false);
private:
const uint8_t* m_font; // Current font.
uint8_t m_font_offset = 2; // Font bytes for meta data.
uint8_t m_font_width; // Font witdth.
uint8_t m_col; // Cursor column.
uint8_t m_row; // Cursor row (RAM).
bool m_inverse=false; // Inverse text.
TwoWire* m_wire;
};
extern ACROBOTIC_SSD1306 oled; // ACROBOTIC_SSD1306 object
#endif
You can click here to experience PicoBricks on the simulator!
