



#23 Air Piano Project With PicoBricks
02 Nov 2023
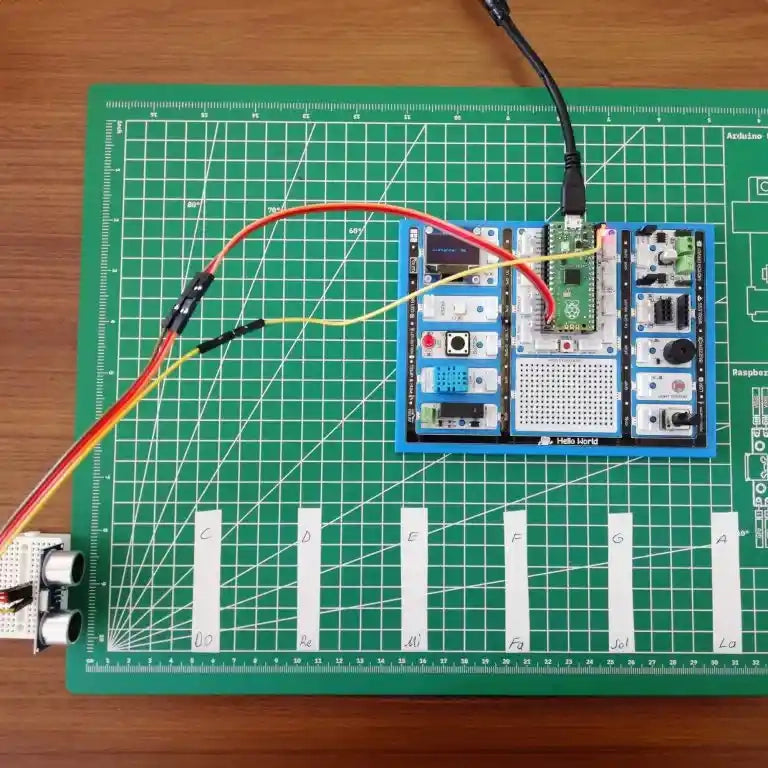
Wiring Diagram

Construction Stages of the Project


MicroBlocks Codes of the PicoBricks

You can access the Microblocks codes of the project by dragging the image to the Microblocks Run tab or click the button.
MicroPython Codes of the PicoBricks
from machine import Pin, PWM, I2C
from utime import sleep
import utime
from picobricks import SSD1306_I2C
import _thread
#define the libraries
buzzer=PWM(Pin(20,Pin.OUT))
trigger = Pin(15, Pin.OUT)
echo = Pin(14, Pin.IN)
#define the input and Output pins
WIDTH = 128
HEIGHT = 64
#OLED screen settings
sda=machine.Pin(4)
scl=machine.Pin(5)
i2c=machine.I2C(0,sda=sda, scl=scl, freq=1000000)
#initialize digital pin 4 and 5 as an OUTPUT for OLED communication
oled = SSD1306_I2C(WIDTH, HEIGHT, i2c)
measure=0
def getDistance():
trigger.low()
utime.sleep_us(2)
trigger.high()
utime.sleep_us(5)
trigger.low()
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
timepassed = signalon - signaloff
distance = (timepassed * 0.0343) / 2
return distance
#calculate distance
def airPiano():
while True:
global measure
if measure>5 and measure<11:
buzzer.duty_u16(4000)
buzzer.freq(262)
sleep(0.4)
elif measure>10 and measure<16:
buzzer.duty_u16(4000)
buzzer.freq(294)
sleep(0.4)
elif measure>15 and measure<21:
buzzer.duty_u16(4000)
buzzer.freq(330)
sleep(0.4)
elif measure>20 and measure<26:
buzzer.duty_u16(4000)
buzzer.freq(349)
sleep(0.4)
elif measure>25 and measure<31:
buzzer.duty_u16(4000)
buzzer.freq(392)
sleep(0.4)
elif measure>30 and measure<36:
buzzer.duty_u16(4000)
buzzer.freq(440)
sleep(0.4)
elif measure>35 and measure<41:
buzzer.duty_u16(4000)
buzzer.freq(494)
sleep(0.4)
else:
buzzer.duty_u16(0)
_thread.start_new_thread(airPiano, ())
#play the tone determined by the value of the distance sensor
while True:
measure=int(getDistance())
oled.text("Distance " + str(measure)+ " cm", 5,30)
oled.show()
sleep(0.01)
oled.fill(0)
oled.show()
#write the specified texts to the determined x and ye coordinates on the OLED screen
Arduino C Codes of the PicoBricks
#include <Wire.h>
#include "ACROBOTIC_SSD1306.h"
#include <NewPing.h>
#define TRIGGER_PIN 15
#define ECHO_PIN 14
#define MAX_DISTANCE 400
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
#define T_C 262
#define T_D 294
#define T_E 330
#define T_F 349
#define T_G 392
#define T_A 440
#define T_B 493
const int Buzzer = 20;
void setup() {
pinMode(Buzzer,OUTPUT);
Wire.begin();
oled.init();
oled.clearDisplay();
#if defined(__AVR_ATtiny85__) && (F_CPU == 16000000)
clock_prescale_set(clock_div_1);
#endif
}
void loop() {
delay(50);
int distance=sonar.ping_cm();
if(distance>5 & distance<11)
{
tone(Buzzer,T_C);
}
else if(distance>10 & distance<16)
{
tone(Buzzer,T_D);
}
else if(distance>15 & distance<21)
{
tone(Buzzer,T_E);
}
else if(distance>20 & distance<26)
{
tone(Buzzer,T_F);
}
else if(distance>25 & distance<31)
{
tone(Buzzer,T_G);
}
else if(distance>30 & distance<36)
{
tone(Buzzer,T_A);
}
else if(distance>35 & distance<41)
{
tone(Buzzer,T_B);
}
else
{
noTone(Buzzer);
}
oled.clearDisplay();
oled.setTextXY(2,4);
oled.putString("Distance: ");
oled.setTextXY(4,6);
String string_distance=String(distance);
oled.putString(string_distance);
oled.setTextXY(4,8);
oled.putString("cm");
}
GitHub Page
