



#17 Two Axis Robot Arm Project With PicoBricks
Robot arms have replaced human power in the industrial field. In factories, robotic arms undertake the tasks of carrying and turning loads of weights and sizes that cannot be carried by a human. Being able to be positioned with a precision of one thousandth of a millimeter is above the sensitivity that a human hand can exhibit. When you watch the production videos of automobile factories, you will see how vital the robot arms are. The reason why they are called robots is that they can be programmed to do the same work with endless repetitions. The reason why it is called an arm is because it has an articulated structure like our arms. How many different directions a robot arm can rotate and move is expressed as axes. Robot arms are also used for carving and shaping aluminum and various metals. These devices, which are referred to as 7-axis CNC Routers, can shape metals like a sculptor shapes mud.
Depending on the robot arm’s purpose, stepper motors and servo motors can be used. PicoBricks allows you to make projects with servo motors.
Details and Algorithm
1X PicoBricks
2X Servo Motor
4X Easy connection Cables
Jumper Cables
Wiring Diagram

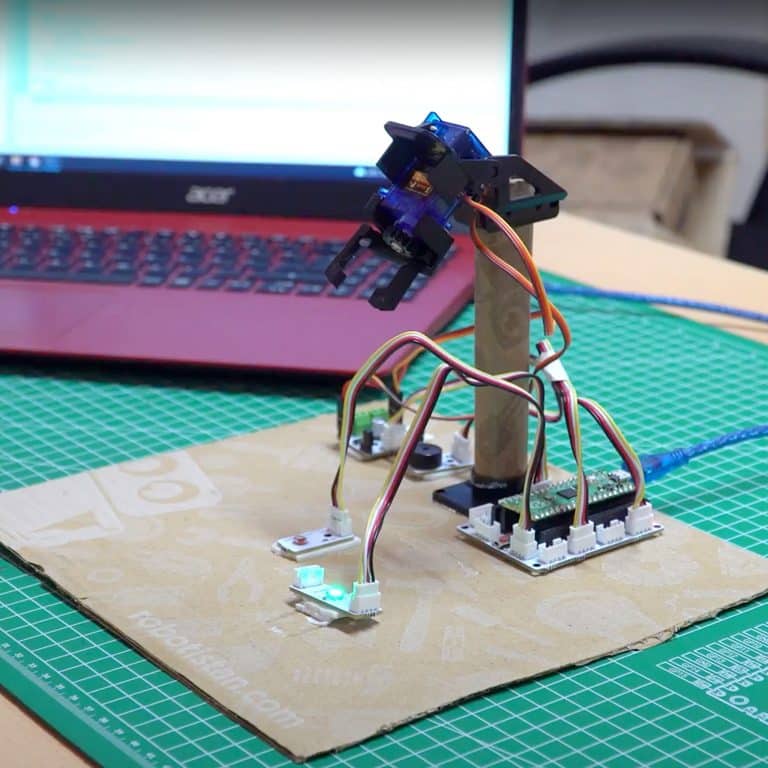
Prepare the parts of the Pan-Tilt kit to prepare the project. Carry your 3D printed parts, waste cardboard pieces, hot silicone glue and scissors with you.



3) Fix parts A and C together with 2 pointed screws.

4) Internally attach the servo motor to part C. Then place the servo motor on part B and screw it.


5) For the holder, cut one of the servo motor heads in the middle of the gear part that you printed on the 3D printer and place it into the gear. Then screw it to the servo motor.

6) Adhere together the 3D printed Linear gear and the handle with strong adhesive.

7) Place the servo in the 3D print holder and fix it. You can do this with hot silicone or by screwing. When placing the servo gear on the linear gear, make sure it is fully open.

8) Attach the holding servo system to part B with silicone.

9) Pass the piece we prepared in step 3 over the cylinder we prepared from cardboard in the first step and fix it with silicone.

10) Put the motor drive jumpers on the Servo pins. Connect the cable of the holding servo to the GPIO21 and the cable of the tilting servo to the GPIO22.


MicroBlocks Codes of the PicoBricks

You can access the Microblocks codes of the project by dragging the image to the Microblocks Run tab or click the button.
from machine import Pin, PWM, ADC
from utime import sleep
from picobricks import WS2812
#define libraries
ws = WS2812(6, brightness=0.3)
ldr=ADC(27)
buzzer=PWM(Pin(20, Pin.OUT))
servo1=PWM(Pin(21))
servo2=PWM(Pin(22))
# define LDR, buzzer and servo motors pins
servo1.freq(50)
servo2.freq(50)
buzzer.freq(440)
# define frequencies of servo motors and buzzer
RED = (255, 0, 0)
GREEN = (0, 255, 0)
BLACK = (0, 0, 0) # RGB color settings
angleupdown=4770
angleupdown2=8200
def up():
global angleupdown
for i in range (45):
angleupdown +=76
servo2.duty_u16(angleupdown)
sleep(0.03)
buzzer.duty_u16(2000)
sleep(0.1)
buzzer.duty_u16(0)
# servo2 goes up at specified intervals
def down():
global angleupdown
for i in range (45):
angleupdown -=76
servo2.duty_u16(angleupdown)
sleep(0.03)
buzzer.duty_u16(2000)
sleep(0.1)
buzzer.duty_u16(0)
# servo2 goes down at specified intervals
def open():
global angleupdown2
for i in range (45):
angleupdown2 +=500
servo1.duty_u16(angleupdown2)
sleep(0.03)
buzzer.duty_u16(2000)
sleep(0.1)
buzzer.duty_u16(0)
# servo1 works for opening the clamps
def close():
global angleupdown2
for i in range (45):
angleupdown2 -=500
servo1.duty_u16(angleupdown2)
sleep(0.03)
buzzer.duty_u16(2000)
sleep(0.1)
buzzer.duty_u16(0)
# servo1 works for closing the clamps
open()
servo2.duty_u16(angleupdown)
ws.pixels_fill(BLACK)
ws.pixels_show()
while True:
if ldr.read_u16()>20000:
ws.pixels_fill(RED)
ws.pixels_show()
sleep(1)
buzzer.duty_u16(2000)
sleep(1)
buzzer.duty_u16(0)
open()
sleep(0.5)
down()
sleep(0.5)
close()
sleep(0.5)
up()
ws.pixels_fill(GREEN)
ws.pixels_show()
sleep(0.5)
# According to the data received from LDR, RGB LED lights red and green and servo motors move
Robot Arm Servo Code:
from machine import Pin, PWM
servo1=PWM(Pin(21))
servo2=PWM(Pin(22))
servo1.freq(50)
servo2.freq(50)
servo1.duty_u16(8200) # 180 degree
servo2.duty_u16(4770) # 90 degree
