



PicoBricks Tebrikler!
İçindekiler
Mı arıyorsun yeni başlayanlar için kodlama oyunları ve tüm? PicoBricks'i selamlayarak başlayabilirsiniz! Ancak selamlaşmak tek başına yapılan bir eylem değildir. PicoBricks ve PicoBricks arkadaşınızı alın ve maceraya dalın. eğlenceli kodlama projeleri!
Ayrıntılar ve Algoritma
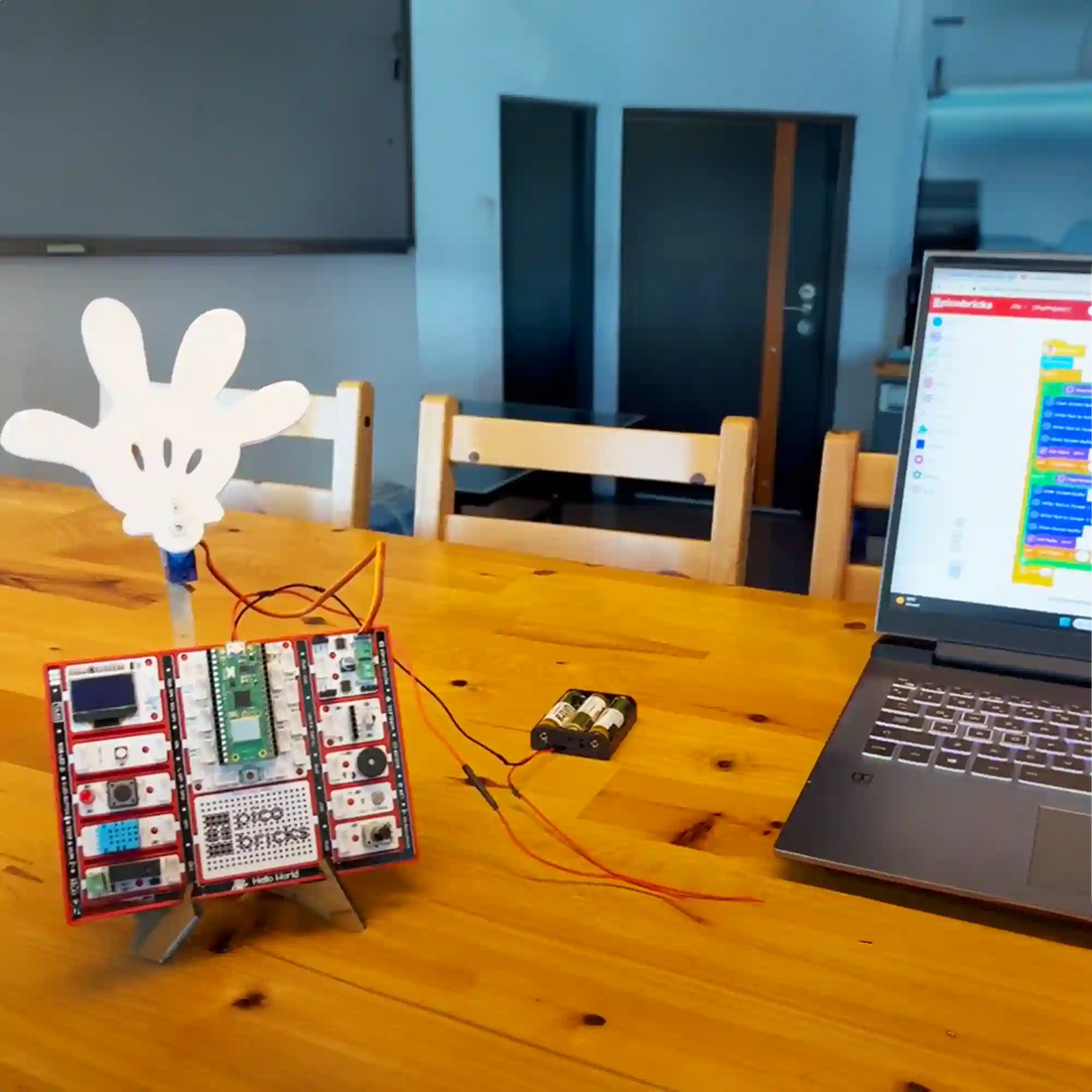
Bunda yeni başlayanlar için kodlama oyunu ve tüm, A düğme bir selamlama dizisinin başlatılması için tetikleyici görevi görür. Düğmeye basıldığında bir işlevi etkinleştirir rölebu da kendisine bağlı diğer PicoBricks modüllerine güç sağlar. Bu PicoBrick'ler, dalgalı bir hareket oluşturacak şekilde programlanmış servo motorlarla donatılmıştır.
Sonuç, dost canlısı ve etkileşimli bir karşılama mekanizmasıdır. Düğmenin başlangıç noktası rolü, selamlamanın yalnızca istendiğinde başlatılmasını sağlar ve röle, senkronize hareket için gücü PicoBricks'e verimli bir şekilde dağıtır.
Bu proje, ilgi çekici ve kullanıcı dostu bir karşılama sistemi oluşturmak için donanım bileşenlerini ve programlamayı birleştirir.
Bileşenler
2 x PicoBrick
1 x Servo Motor
Batarya tutucu
Atlama Kabloları
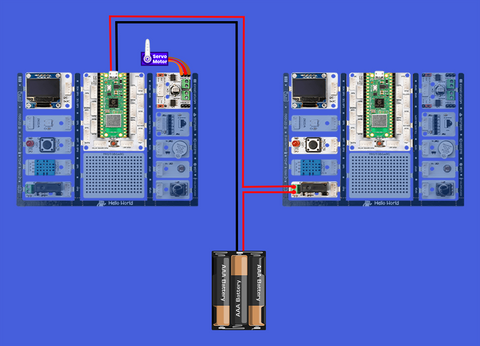
Kablolama Şeması
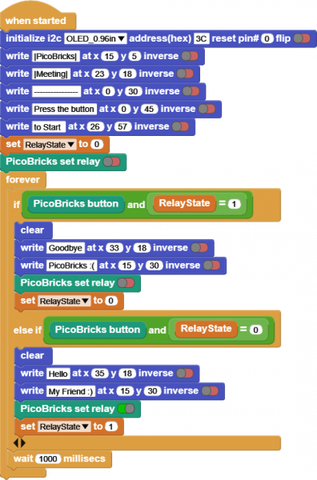
PicoBricks'in MicroBlock Kodları
Aşağıdaki kod PicoBricks'in Merhaba dediği koddur.
STL dosyasındaki elin bağlı olduğu PicoBricks’e aşağıdaki kodun yazılması gerekmektedir. Bu kod ile ele bağlı servo motor hareket edecek ve el sallama hareketi yapacaktır.

PicoBricks PicoBricks'in IDE Kodları
Aşağıdaki kod PicoBricks'in Merhaba dediği koddur.

STL dosyasındaki elin bağlı olduğu PicoBricks’e aşağıdaki kodun yazılması gerekmektedir. Bu kod ile ele bağlı servo motor hareket edecek ve el sallama hareketi yapacaktır.

PicoBricks'in MicroPython Kodları
Aşağıdaki kod PicoBricks'in Merhaba dediği koddur.
zamandan içe uyku
makineden içe aktarma Pimi
makine ithalatından I2C
picobricks'ten SSD1306_I2C'yi içe aktar
ithalat makinesi
ithalat zamanı
i2c = I2C(0, scl=Pin(5), sda=Pin(4), frek=200000)
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
pin_button = makine.Pin(10, makine.Pin.IN)
pin = makine.Pin(12, makine.Pin.ÇIKIŞ)
oled.fill(0)
oled.text("{}".format("|PicoBricks|"), 15, 5)
oled.text("{}".format("|Toplantı|"), 23, 18)
oled.text("{}".format("----------------"), 0, 30)
oled.text("{}".format("Düğmeye basın"), 0, 45)
oled.text("{}".format("Başlamak İçin "), 26, 57)
oled.show()
röleDurumu = 0
while (pin_button.value()) == (0):
geçmek
Doğruyken:
if (pin_button.value()) == (1) ve röleState:
oled.fill(0)
oled.text("{}".format("Güle güle"), 33, 18)
oled.text("{}".format("PicoBricks :("), 15, 30)
oled.show()
pin.off()
röleDurumu = 0
elif (pin_button.value()) == (1) ve röleState == (0):
oled.fill(0)
oled.text("{}".format("Merhaba"), 35, 18)
oled.text("{}".format("Arkadaşım :)"), 15, 30)
oled.show()
çam fıstığı()
röleDurumu = 1
zaman.uyku((0.2))
STL dosyasındaki elin bağlı olduğu PicoBricks’e aşağıdaki kodun yazılması gerekmektedir. Bu kod ile ele bağlı servo motor hareket edecek ve el sallama hareketi yapacaktır.
zamandan içe uyku
makineden içe aktarma Pimi
makine ithalatından I2C
picobricks'ten SSD1306_I2C'yi içe aktar
makine içe aktarma PWM'sinden
matematik ithalat fabrikalarından
ithalat zamanı
i2c = I2C(0, scl=Pin(5), sda=Pin(4), frek=200000)
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
pwm_1 = PWM(Pin(21))
pwm_1.freq(50)
def Açı Hesapla(açı):
açı = fabrikalar((açı * (6000 / 180)) + 2000)
açı = yuvarlak(açı)
dönüş açısı
Doğruyken:
oled.text("{}".format("MERHABA :)"), 30, 30)
pwm_1.duty_u16(Açı Hesapla(60))
zaman.uyku((0.2))
pwm_1.duty_u16(Açı Hesapla(120))
zaman.uyku((0.2))
PicoBricks'in Arduino C Kodları
Aşağıdaki kod PicoBricks'in Merhaba dediği koddur.
#katmak
#katmak
#katmak
#include "ACROBOTIC_SSD1306.h"
#define PICO_BUTTON 10
#RÖLE 12'yi tanımla
bool durumu = yanlış;
geçersiz kurulum() {
Serial.begin(115200);
pinMode(PICO_BUTTON,INPUT);
pinMode(RÖLE,ÇIKIŞ);
Wire.begin();
oled.init();
oled.clearDisplay();
oled.setTextXY(1,3);
oled.putString("PicoBricks");
oled.setTextXY(3,4);
oled.putString("Toplantı");
oled.setTextXY(5,0);
oled.putString("Düğmeye basın");
oled.setTextXY(7,3);
oled.putString("Başlamak İçin");
}
geçersiz döngü () {
if(state == false && digitalRead(PICO_BUTTON) == HIGH){
digitalWrite(RÖLE, YÜKSEK);
oled.clearDisplay();
oled.setTextXY(3,5);
oled.putString("Merhaba");
oled.setTextXY(5,2);
oled.putString("Arkadaşım :)");
durum = doğru;
gecikme(100);
}else if (state == true && digitalRead(PICO_BUTTON) == HIGH){
digitalWrite(röle, DÜŞÜK);
oled.clearDisplay();
oled.setTextXY(3,4);
oled.putString("Güle güle");
oled.setTextXY(5,2);
oled.putString("PicoBricks :(");
durum = yanlış;
gecikme(100);
}
}
STL dosyasındaki elin bağlı olduğu PicoBricks’e aşağıdaki kodun yazılması gerekmektedir. Bu kod ile ele bağlı servo motor hareket edecek ve el sallama hareketi yapacaktır.
#katmak
#katmak
#katmak
#include "ACROBOTIC_SSD1306.h"
Servo servo1;
geçersiz kurulum() {
//dht sensörünü ve Oled ekranını tanımlıyoruz
Serial.begin(115200);
servo1.attach(21);
Wire.begin();
oled.init();
oled.clearDisplay();
oled.setTextXY(3,5);
oled.putString("Merhaba");
oled.setTextXY(5,3);
oled.putString("PicoBricks");
}
geçersiz döngü () {
servo1.write(120);
gecikme(200);
servo1.write(45);
gecikme(200);
}
