



#22 PicoBricks ile Dijital Cetvel Projesi
03 Nov 2023
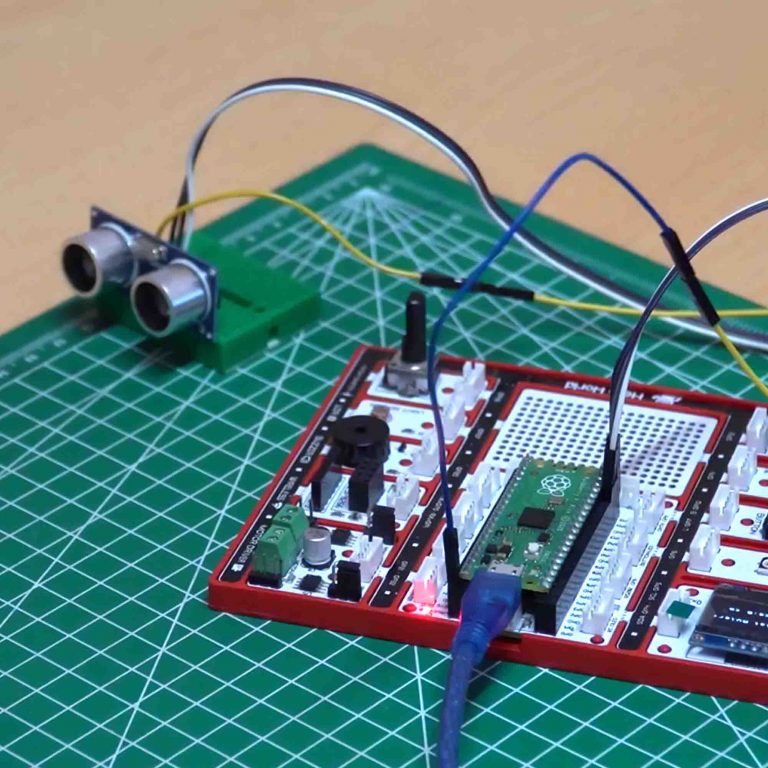
Bağlantı şeması

Projeyi hazırlamak için çift taraflı köpük bant, maket bıçağı, yaklaşık 15x10x5 cm ebatlarında atık karton kutuya ihtiyacınız var.
1) Ultrasonik sensör, OLED ekran, düğme LED modülü için delikleri kesin, zil, akü kutusunun kablolarını maket bıçağıyla geçirmek için.

2) Tüm kabloları kutunun içine asın ve modüllerin arkasını çift taraflı köpük bantla kutuya yapıştırın. Bağlan tetik ultrasonik sensörün pimini GPIO14 pin ve Eko pinlemek GPIO15 toplu iğne. VCC pinini VBUS Picoboard'a sabitleyin.


PicoBricks'in MicroBlock Kodları

Mikrobloklar Çalıştır sekmesine görseli sürükleyerek veya butonuna tıklayarak projenin Mikroblok kodlarına ulaşabilirsiniz.
PicoBricks'in MicroPython Kodları
makineden içe aktarma Pin, PWM, I2C
utime içe aktarma uykusundan
picobricks'ten SSD1306_I2C'yi içe aktar
kullanım süresini içe aktar
# Kütüphaneleri tanımlayın
redLed = Pin(7, Pin.OUT)
düğmesi = Pin(10, Pin.IN, Pin.PULL_DOWN)
buzzer = PWM(Pin(20, Pin.OUT))
buzzer.freq(392)
tetikleyici = Pin(15, Pin.OUT)
echo = Pin(14, Pin.IN)
# Giriş ve çıkış pinlerini tanımlayın
GENİŞLİK = 128
YÜKSEKLİK = 64
# OLED ekran ayarları
sda = makine.Pin(4)
scl = makine.Pin(5)
i2c = makine.I2C(0, sda=sda, scl=scl, frek=1000000)
# OLED iletişimi için dijital pin 4 ve 5'i ÇIKIŞ olarak başlatın
oled = SSD1306_I2C(128, 64, i2c)
ölçü = 0
sonMesafe = 0
def getDistance():
tetikleyici.düşük()
utime.sleep_us(2)
tetikleyici.yüksek()
utime.sleep_us(5)
tetikleyici.düşük()
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
geçen süre = sinyal açık - sinyal kapalı
mesafe = (geçen süre * 0,0343) / 2
dönüş mesafesi
# Mesafeyi hesapla
def getMeasure(pin):
küresel ölçü
küresel finalMesafe
redLed.value(1)
(20) aralığındaki i için:
ölçü += getDistance()
uyku(0,05)
kırmızıLed.value(0)
finalDistance = (ölçü/20) + 1
oled.fill(0)
oled.show()
oled.text(">Dijital Cetvel<", 2, 5)
oled.text("Mesafe " + str(round(finalDistance)) + " cm", 0, 32)
oled.show()
# Belirtilen mesafeyi belirtilen x ve y koordinatlarına OLED ekranında yazdırın
yazdır(sonMesafe)
buzzer.duty_u16(4000)
uyku(0,05)
buzzer.duty_u16(0)
ölçü = 0
sonMesafe = 0
# Zili çal
Button.irq(trigger=machine.Pin.IRQ_RISING, işleyici=getMeasure)
PicoBricks'in Arduino C Kodları
#include
#include "ACROBOTIC_SSD1306.h"
#include
//Kütüphaneleri tanımlayalım
#define TRIGGER_PIN 15
#define ECHO_PIN 14
#define MAX_DISTANCE 400
YeniPing sonarı(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
#tanımla T_B 493
int mesafe = 0;
int toplam = 0;
geçersiz kurulum() {
pinMode(7, ÇIKIŞ);
pinMode(20, ÇIKIŞ);
pinMode(10, INPUT);
// Giriş ve çıkış pinlerini tanımlıyoruz
Wire.begin();
oled.init();
oled.clearDisplay();
}
geçersiz döngü () {
gecikme(50);
if(digitalRead(10) == 1) {
int ölçü = 0;
digitalWrite(7, YÜKSEK);
tone(20, T_B);
gecikme(500);
ton yok(20);
for (int i = 0; i < 20; i++) {
ölçü = sonar.ping_cm();
toplam = toplam + ölçü;
gecikme(50);
}
mesafe = toplam / 20 + 6; // Mesafeyi hesapla
digitalWrite(7, DÜŞÜK);
gecikme(1000);
oled.clearDisplay();
oled.setTextXY(2, 1);
oled.putString(">Dijital Cetvel<");
oled.setTextXY(5, 1);
oled.putString("Mesafe: ");
oled.setTextXY(5, 10);
String string_distance = String(mesafe);
oled.putString(string_distance);
oled.setTextXY(5, 12);
oled.putString("cm"); // Hesaplanan mesafeyi OLED ekrana yazdırıyoruz
ölçü = 0;
mesafe = 0;
toplam = 0;
}
}
GitHub Proje Sayfası
