



#22 Digitales Linealprojekt mit PicoBricks
Schaltplan

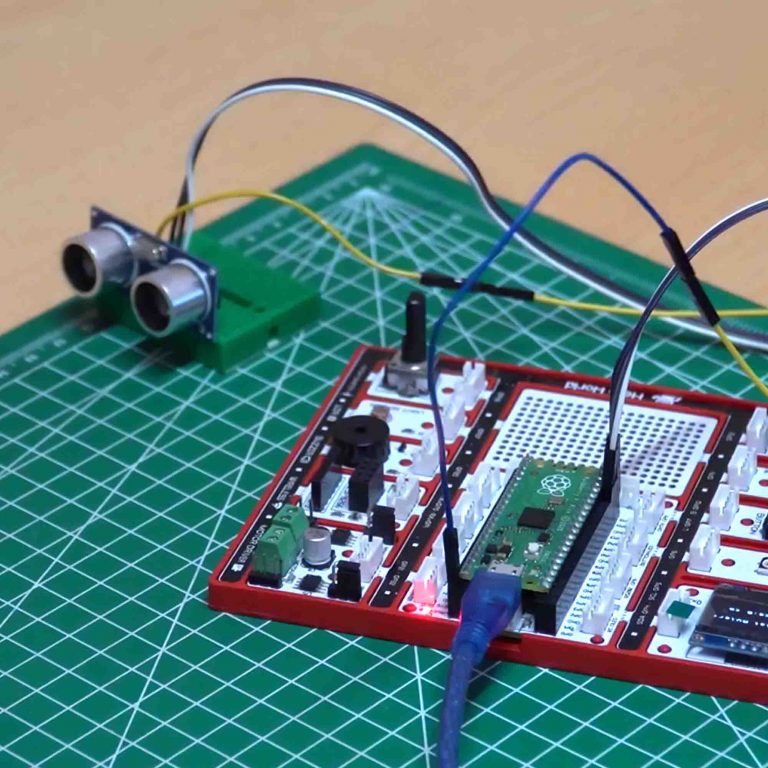
Zur Vorbereitung des Projekts benötigen Sie doppelseitiges Schaumstoffband, ein Universalmesser und einen Abfallkarton von ca. 15 x 10 x 5 cm.
1) Schneiden Sie die Löcher für den Ultraschallsensor, den OLED-Bildschirm, das Tasten-LED-Modul usw. Summer, Batteriekasten, um die Kabel mit einem Universalmesser durchzuführen.

2) Hängen Sie alle Kabel in die Box und befestigen Sie die Rückseite der Module mit doppelseitigem Schaumstoffklebeband an der Box. Verbinden Sie die trig Pin des Ultraschallsensors an den GPIO14 Pin und die Echo Pin an die GPIO15 Stift. Sie sollten den VCC-Pin mit dem verbinden VBUS Pin auf dem Picoboard.


MicroBlocks-Codes der PicoBricks

Sie können auf die Microblocks-Codes des Projekts zugreifen, indem Sie das Bild auf die Registerkarte „Microblocks Run“ ziehen oder auf die Schaltfläche klicken.
Registerkarte „Mikroblöcke ausführen“.
MicroPython-Codes der PicoBricks
Vom Maschinenimport Pin, PWM, I2C
aus utime import schlaf
Von Picobricks importieren Sie SSD1306_I2C
Zeit importieren
# Definieren Sie die Bibliotheken
redLed = Pin(7, Pin.OUT)
button = Pin(10, Pin.IN, Pin.PULL_DOWN)
Summer = PWM(Pin(20, Pin.OUT))
Buzzer.freq(392)
Trigger = Pin(15, Pin.OUT)
echo = Pin(14, Pin.IN)
# Definieren Sie Eingangs- und Ausgangspins
BREITE = 128
HÖHE = 64
# OLED-Bildschirmeinstellungen
sda = machine.Pin(4)
scl = machine.Pin(5)
i2c = machine.I2C(0, sda=sda, scl=scl, freq=1000000)
# Initialisieren Sie die digitalen Pins 4 und 5 als AUSGANG für die OLED-Kommunikation
oled = SSD1306_I2C(128, 64, i2c)
Maß = 0
finalDistance = 0
def getDistance():
trigger.low()
utime.sleep_us(2)
trigger.high()
utime.sleep_us(5)
trigger.low()
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
timepassed = signalon – signaloff
Distanz = (verstrichene Zeit * 0,0343) / 2
Rückweg
# Berechnen Sie die Entfernung
def getMeasure(pin):
globales Maß
globale finalDistance
redLed.value(1)
für i im Bereich(20):
messen += getDistance()
Schlaf(0,05)
redLed.value(0)
finalDistance = (Maß/20) + 1
oled.fill(0)
oled.show()
oled.text(">Digital Ruler<", 2, 5)
oled.text("Distance " + str(round(finalDistance)) + " cm", 0, 32)
oled.show()
# Drucken Sie den angegebenen Abstand zu den angegebenen X- und Y-Koordinaten auf dem OLED-Bildschirm
print(finalDistance)
Buzzer.duty_u16(4000)
Schlaf(0,05)
Buzzer.duty_u16(0)
Maß = 0
finalDistance = 0
# Den Summer ertönen lassen
button.irq(trigger=machine.Pin.IRQ_RISING, handler=getMeasure)
Arduino C-Codes der PicoBricks
#include
#include „ACROBOTIC_SSD1306.h“
#include
// Definiere die Bibliotheken
#define TRIGGER_PIN 15
#define ECHO_PIN 14
#define MAX_DISTANCE 400
NewPing-Sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
#define T_B 493
int Abstand = 0;
int total = 0;
void setup() {
pinMode(7, OUTPUT);
pinMode(20, OUTPUT);
pinMode(10, INPUT);
// Definiere Eingangs- und Ausgangspins
Wire.begin();
oled.init();
oled.clearDisplay();
}
void loop() {
Verzögerung(50);
if(digitalRead(10) == 1) {
int Maß = 0;
digitalWrite(7, HIGH);
Ton(20, T_B);
Verzögerung (500);
noTone(20);
for (int i = 0; i < 20; i++) {
Measure = sonar.ping_cm();
Gesamt = Gesamt + Maß;
Verzögerung(50);
}
Distanz = gesamt / 20 + 6; // Berechne die Entfernung
digitalWrite(7, LOW);
Verzögerung (1000);
oled.clearDisplay();
oled.setTextXY(2, 1);
oled.putString(">Digital Ruler<");
oled.setTextXY(5, 1);
oled.putString("Entfernung: ");
oled.setTextXY(5, 10);
String string_distance = String(distance);
oled.putString(string_distance);
oled.setTextXY(5, 12);
oled.putString("cm"); // Drucken Sie die berechnete Distanz auf dem OLED-Bildschirm aus
Maß = 0;
Abstand = 0;
gesamt = 0;
}
}
GitHub-Projektseite
