



#21 Automatisches Papierkorbprojekt mit PicoBricks
Mülleimer, die sich automatisch öffnen wenn sie angesprochen werden, und wenn sie voll sind, stellen Sie die Säcke zum Wegwerfen bereit, fanden Käufer zu Preisen, die weit über ihren Kosten lagen. Darüber hinaus sorgten Desinfektionsautomaten für kontaktlose Hygiene, indem sie eine bestimmte Menge Flüssigkeit in unsere Handflächen schütteten, wenn wir unsere Hände darunter hielten. In den Regalen standen automatische Desinfektionsautomaten zu Preisen, die deutlich über ihrem Selbstkostenpreis lagen. Diese beiden Produkte weisen hinsichtlich ihrer Funktionsweise Ähnlichkeiten auf. Bei Desinfektionsautomaten übernimmt eine Pumpe mit Elektromotor oder Servomotor die Abgabe der Flüssigkeit. In automatischen Mülleimern wurde ein Servomotor verwendet, der den Deckel öffnet, und Infrarot- oder Ultraschallsensoren wurden zur Erkennung von Handbewegungen verwendet.
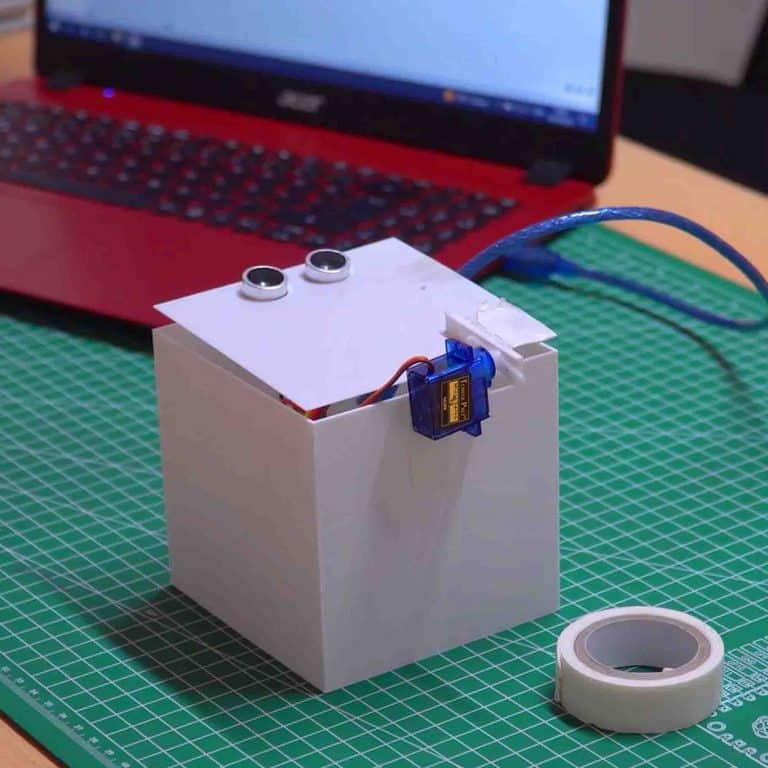
In diesem Projekt bauen Sie mithilfe eines Ultraschallsensors und eines Servomotors aus PicoBricks einen automatischen, stilvollen Mülleimer für Ihr Zimmer.
Schaltplan



3: Führen Sie die Kabel des Ultraschall-Abstandssensors durch das Loch in der Box und verbinden Sie sie mit den im PicoBricks-Schaltplan gezeigten Pins, stellen Sie den Servomotor her und Kraftfahrer Verbindungen. 4: Befestigen Sie den Servomotor, die PicoBricks und die Motortreiberteile mit Heißkleber am Gehäuse.

Wenn alles gut gelaufen ist und Sie Ihre Hand in die Nähe der Mülltonne halten, öffnet sich der Deckel des Eimers und schließt sich wieder, nachdem Sie den Müll weggeworfen haben.

MicroBlocks-Codes der PicoBricks

Sie können auf die Microblocks-Codes des Projekts zugreifen, indem Sie das Bild auf die Registerkarte „Microblocks Run“ ziehen oder auf klicken Taste.
Registerkarte „Mikroblöcke ausführen“.
MicroPython-Codes der PicoBricks
vom Maschinenimport Pin, PWM
aus utime import schlaf
Servo = PWM (Pin(21, Pin.OUT))
Trigger = Pin(15, Pin.OUT)
echo = Pin(14, Pin.IN)
servo.freq(50)
servo.duty_u16(1920) # 15 Grad
def getDistance():
trigger.low()
utime.sleep_us(2)
trigger.high()
utime.sleep_us(5)
trigger.low()
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
timepassed = signalon – signaloff
Distanz = (verstrichene Zeit * 0,0343) / 2
print("Der Abstand vom Objekt beträgt ", distance, "cm")
Rückweg
während True:
Schlaf(0,01)
wenn int(getDistance()) <= 10:
servo.duty_u16(4010) # 70 Grad
utime.sleep(0.3)
servo.duty_u16(1920)
Arduino C-Codes der PicoBricks
#include
#trigPin 14 definieren
#echoPin 15 definieren
Servo-Servo;
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo.attach(21);
}
void loop() {
lange Dauer, Entfernung;
digitalWrite(trigPin, LOW);
VerzögerungMikrosekunden(2);
digitalWrite(trigPin, HIGH);
VerzögerungMikrosekunden(10);
digitalWrite(trigPin, LOW);
Dauer = PulseIn(echoPin, HIGH);
Distanz = (Dauer/2) / 29,1;
if (Abstand < 80) {
Serial.print(distanz);
Serial.println(" cm");
servo.write(179);
} else if (Abstand < 180) {
Serial.print(distanz);
Serial.println(" cm");
servo.write(100);
}
}
GitHub-Projektseite
