Otto Tank Projesi
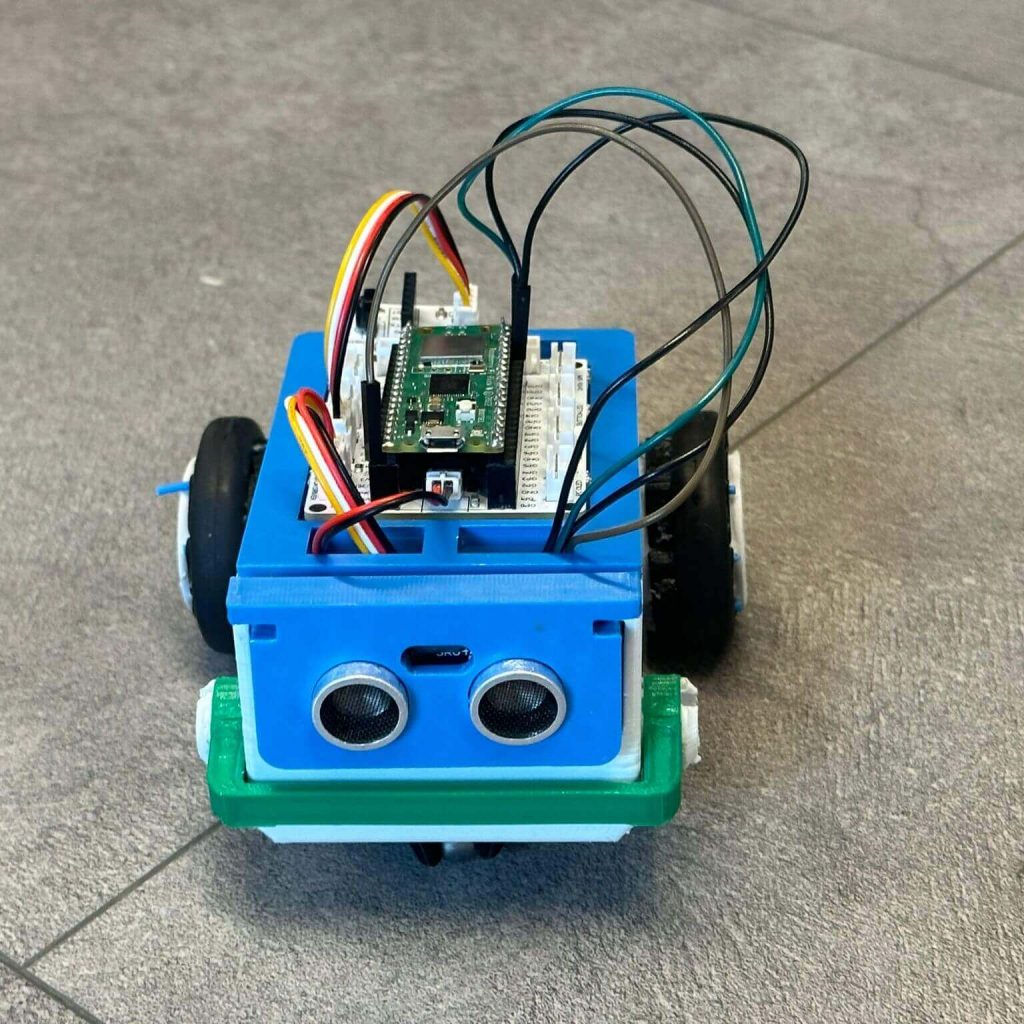
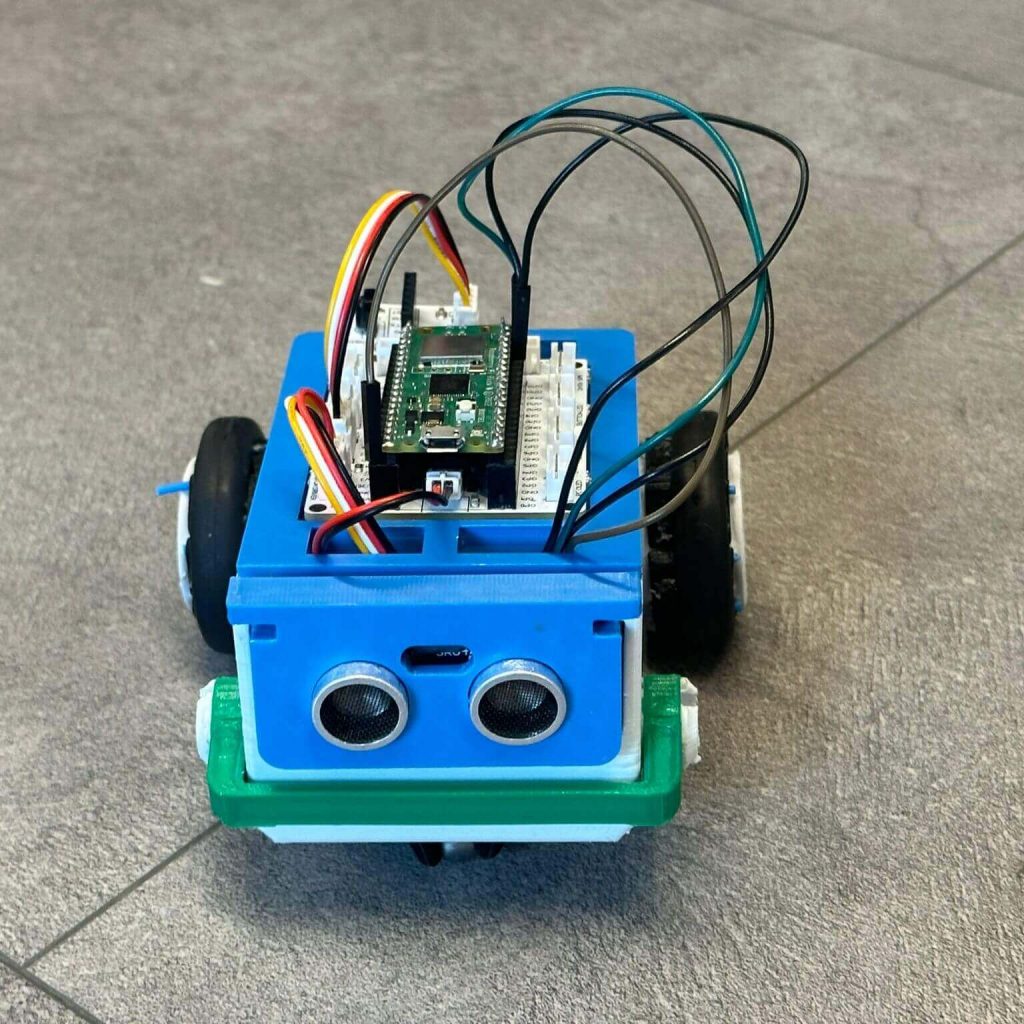
Merhabalar, değerli makerlar! Sizlere, parmaklarınızın ucundaki bir düğmeye dokunarak ileriye ve geriye adımlar atabileceğiniz, sağa ve sola dönebileceğiniz uzaktan kumandalı bir robotun varlığından bahsetmek isterim. Ancak bu robotun en büyüleyici özelliği, kendine has bir koruma mekanizması barındırması. Tank, üzerinde taşıdığı ultrasonik sensör aracılığıyla çevresini sürekli olarak tarar ve karşısına çıkan herhangi bir engelle karşılaştığında, otomatik bir refleksle durur. Siz, uzaktan kumandasının düğmelerine basarak, bu mekanik canavarı istediğiniz yöne götürebilirsiniz.
Teknoloji konusunda bilginiz olmasa da endişelenmeyin. Bu robot, teknolojik bir bilgi birikimi gerektirmeden, her yaştan insanın kullanımına uygun bir şekilde tasarlanmıştır. Bu, hem çocukların hem de yetişkinlerin vakit geçirebileceği, keyif alabileceği bir oyuncaktır.
Peki, siz bu robotu kontrol ederek, engellerle dolu, gizemli bir labirenti keşfetmeye hazır mısınız? Eğer cevabınız evetse, bu robotik serüvene katılmak için okumaya devam edin. Bu uzaktan kumandalı robot projesi, temel teknoloji ve mühendislik konularına dair bir merak uyandırabilir ve bilim ile teknolojiye ilgi duyan kişiler için daha ileri düzey projelere kapı aralayabilir.
1x PicoBricks
1x HC-SR04 Ultrasonik Sensorü
2x DC Motor
Bağlantı Kabloları
Piller
Devre Şeması

Paneldeki modülleri ayırmanız gerekecek, bu nedenle modül bağlantılarını grove kabloları ile yapmalısınız.
İşte sizin için projenin kodları. Hangi dilde yazmak istediğiniz size kalmış :)
PicoBricks IDE Kodları

MicroBlocks Kodları

MicroPython Kodları
from time import sleep
from machine import Pin
from machine import PWM
import utime
from picobricks import NEC_16
from picobricks import IR_RX
from machine import ADC
trigger = Pin(15, Pin.OUT)
echo = Pin(14, Pin.IN)
def getDistance():
trigger.low()
utime.sleep_us(2)
trigger.high()
utime.sleep_us(5)
trigger.low()
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
timepassed = signalon – signaloff
distance = (timepassed * 0.0343) / 2
print(“The distance from object is “,distance,”cm”)
return distance
def ir_callback(data, addr, ctrl):
global ir_data
global ir_addr, data_rcvd
if data > 0:
ir_data = data
ir_addr = addr
print(‘Data {:02x} Addr {:04x}’.format(data, addr))
data_rcvd = True
ir = NEC_16(Pin(0, Pin.IN), ir_callback)
ir_data = 0
data_rcvd = False
motor_1 = PWM(Pin(21))
motor_1.duty_u16(0)
motor_2 = PWM(Pin(22))
motor_2.duty_u16(0)
def left():
global distance
motor_1.duty_u16(50 * 650)
motor_2.duty_u16(0 * 650)
def right():
global distance
motor_1.duty_u16(0 * 650)
motor_2.duty_u16(50 * 650)
def stop():
global distance
motor_1.duty_u16(0 * 650)
motor_2.duty_u16(0 * 650)
def forward():
global distance
motor_1.duty_u16(50 * 650)
motor_2.duty_u16(50 * 650)
while True:
distance = getDistance()
if distance <= (10):
stop()
if data_rcvd == True:
data_rcvd = False
if ir_data == IR_RX.number_left:
left()
if ir_data == IR_RX.number_right:
right()
if ir_data == IR_RX.number_up:
forward()
if ir_data == IR_RX.number_ok:
stop()
Arduino Kodları
#include <IRremote.h>
#include <Wire.h>
#include "ACROBOTIC_SSD1306.h"
#define IR_RECEIVE_PIN 0
#define trigPin 15
#define echoPin 14
int a = 0;
long duration, distance;
void setup() {
//define dht sensor and Oled screen
Serial.begin(115200);
Wire.begin();
oled.init();
oled.clearDisplay();
pinMode(IR_RECEIVE_PIN, INPUT);
IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
if (IrReceiver.decode()) {
a = (IrReceiver.decodedIRData.decodedRawData);
Serial.println(a);
IrReceiver.resume();
}
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
if (distance <= 10)
{
stop();
}
if (a == -1520763136) {
left();
}
if (a == -150405376) {
right();
}
if (a == -417792256) {
forward();
}
if (a == -484638976) {
stop();
}
}
void stop()
{
digitalWrite(21, LOW);
digitalWrite(22, LOW);
}
void left()
{
digitalWrite(21, HIGH);
digitalWrite(22, LOW);
}
void right()
{
digitalWrite(21, LOW);
digitalWrite(22, HIGH);
}
void forward()
{
digitalWrite(21, HIGH);
digitalWrite(22, HIGH);
}