



Hareketli Kuyruk Projesi
Mutlu Kuyruk Projesi
bu yapıcı hareketi ve teknoloji, yenilikçi projeler geliştirmek isteyenlere sınırsız bir yaratıcılık dünyası sunuyor. Bu aktivite sadece eğlenceli olmakla kalmıyor, aynı zamanda değerli bir eğitim fırsatı da sunuyor. Örneğin, potansiyometreler ve servo motorlar gibi analog sensörlerin nasıl kullanılacağını öğrenmek istiyorsanız burası harika bir başlangıç noktasıdır. Bu fırsatı sizi "" ile tanıştırmak için kullanmak istiyoruz.Mutlu Kuyruk Projesi.”
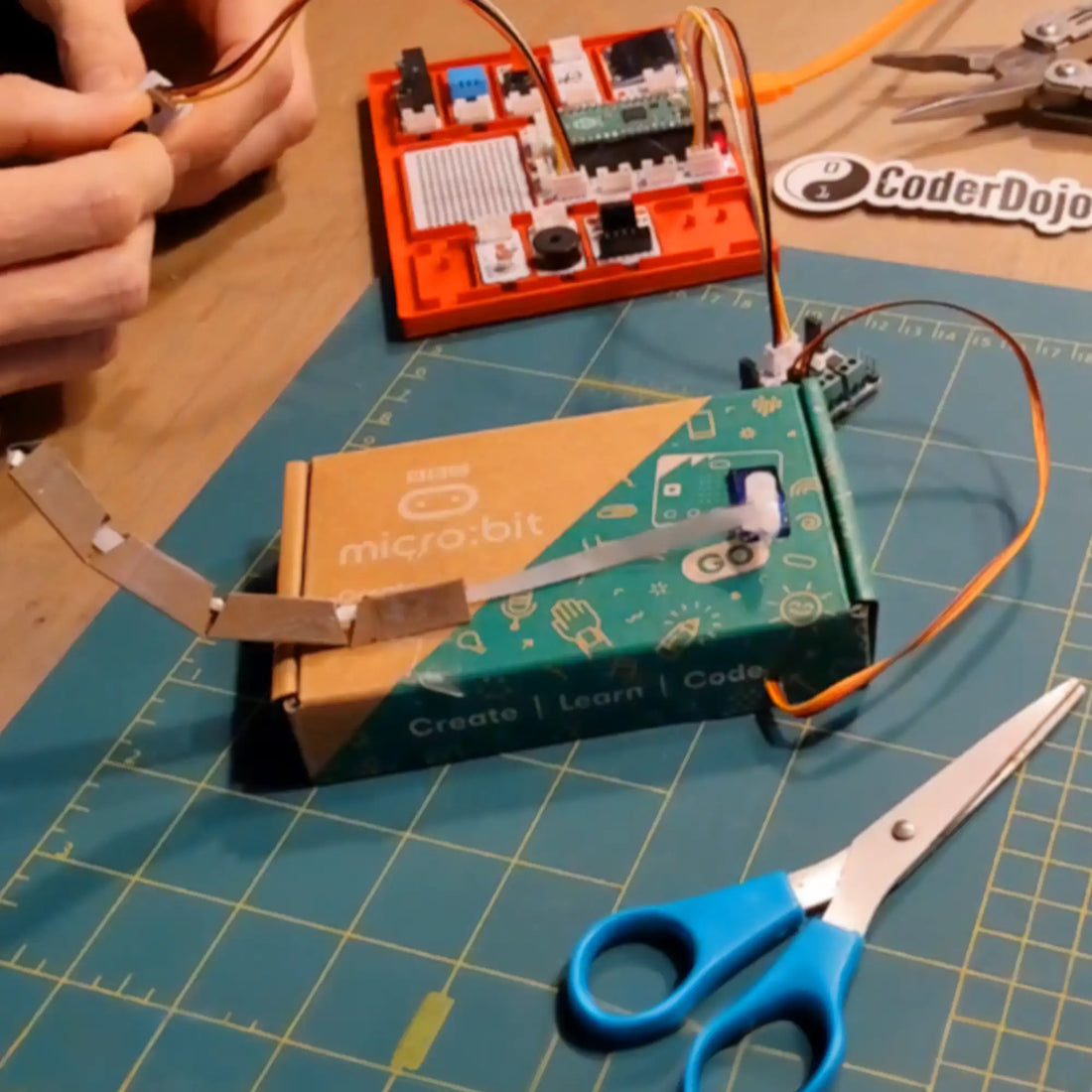
Bu projede bir servo motor, kuyruğa benzeyen bir hareket yaratmak için sihrini kullanıyor. Bu ilgi çekici hareketi istediğiniz herhangi bir hayvan heykelciğine eklemekte özgürsünüz; Fareyle gittik ama olasılıklar sonsuz!
Ayrıntılar ve Algoritma
Hareketli Kuyruk, bir servo motor kullanarak bir oyuncağın veya cihazın arkasındaki kuyruk benzeri hareketi mükemmel bir şekilde taklit eder. Bu projede servo motorun hassas kontrolü bir potansiyometre (tencere). Potansiyometre aracılığıyla motorun açısı tamamen özelleştirilebilir ve istenen herhangi bir konuma hassas bir şekilde ayarlanabilir. Sonuç olarak, bu proje yalnızca bir oyuncağın arkasındaki eğlenceli kuyruğun hareketini kopyalamakla kalmıyor, aynı zamanda yapımcılara elektronik bileşenlerin ve programlamanın temellerini derinlemesine incelemeleri için mükemmel bir fırsat sunuyor. Hareketli Kuyruk Projesi, teknoloji meraklıları ve yapımcı topluluğu için ideal bir başlangıç noktası sunarak sınırsız yaratıcılık ve harika bir öğrenme platformu sunuyor.
Bileşenler
1 x PicoBrick'ler
1 x Servo Motor
1 x Kablolama Kabloları
Bağlantı şeması

PicoBricks'in MicroBlock Kodları

PicoBricks'in PicoBlockly Kodları

PicoBricks'in MicroPython Kodları
zamandan içe uyku
matematik ithalatı
ithalat makinesi
makineden içe aktarma Pimi
makine içe aktarma PWM'sinden
matematik ithalat fabrikalarından
kap = makine.ADC(26)
pwm_1 = PWM(Pin(21))
pwm_1.freq(50)
def Açı Hesapla(açı):
açı = fabrikalar((açı * (6000 / 180)) + 2000)
açı = yuvarlak(açı)
dönüş açısı
Doğru iken:
pwm_1.duty_u16(CalculateAngle(round(((( pot.read_u16() ) + ( 0 )) * ( 90 )) / ( 65535 )) ))
PicoBricks'in Ardunio C Kodları
#katmak
#"ACROBOTIC_SSD1306.h"yi dahil et
#katmak
#define POT_PIN 26
Servo myservo;
int servo_açı = 0;
geçersiz kurulum() {
//dht sensörünü ve Oled ekranını tanımlıyoruz
Serial.begin(115200);
Wire.begin();
oled.init();
oled.clearDisplay();
pinMode(POT_PIN, INPUT);
myservo.attach(21);
myservo.write(0);
}
geçersiz döngü () {
servo_angle = harita(analogRead(POT_PIN),0,1023,0,90);
myservo.write(servo_angle);
}
Proje Görseli

