



PicoBricks Grüße!
Inhaltsverzeichnis
Suchen Sie Programmierspiele für Anfänger und alles? Sie können mit der Begrüßung von PicoBricks beginnen! Doch die Begrüßung ist kein Alleingang. Schnappen Sie sich also Ihre PicoBricks und Ihren PicoBricks-Kumpel und tauchen Sie ein Unterhaltsame Codierungsprojekte!
Details und Algorithmus
In diesem Programmierspiel für Anfänger und alles, A Taste dient als Auslöser für die Einleitung einer Begrüßungssequenz. Wenn die Taste gedrückt wird, wird ein aktiviert Relais, das wiederum andere daran angeschlossene PicoBricks-Module mit Strom versorgt. Diese PicoBricks sind mit Servomotoren ausgestattet, die so programmiert sind, dass sie eine Wellenbewegung erzeugen.
Das Ergebnis ist ein freundlicher und interaktiver Begrüßungsmechanismus. Die Rolle des Knopfes als Ausgangspunkt stellt sicher, dass die Begrüßung nur dann erfolgt, wenn sie beabsichtigt ist, und das Relais verteilt die Energie effizient an die PicoBricks für eine synchronisierte Bewegung.
Dieses Projekt kombiniert Hardwarekomponenten und Programmierung, um ein ansprechendes und benutzerfreundliches Begrüßungssystem zu erstellen.
Komponenten
2 x PicoBricks
1 x Servomotor
Batteriehalter
Überbrückungskabel
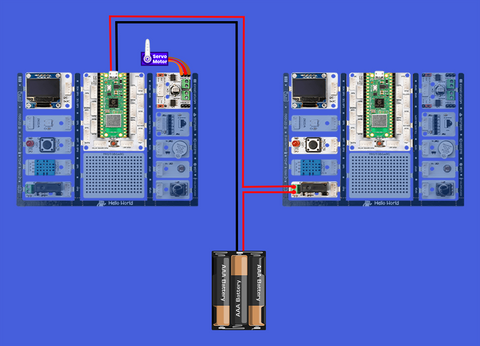
Schaltplan
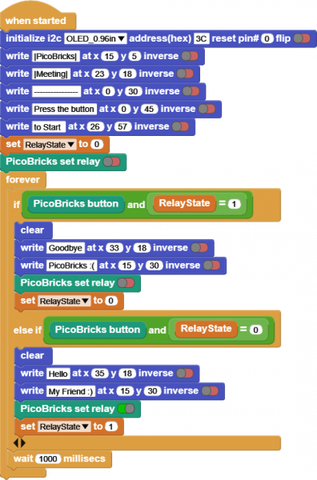
MicroBlocks-Codes von PicoBricks
Der folgende Code ist der Code, zu dem PicoBricks „Hallo“ sagt.
Der folgende Code sollte in die PicoBricks geschrieben werden, mit denen die Hand in der STL-Datei verbunden ist. Mit diesem Code bewegt sich der mit der Hand verbundene Servomotor und führt eine Handbewegung aus.

PicoBricks IDE-Codes von PicoBricks
Der folgende Code ist der Code, zu dem PicoBricks „Hallo“ sagt.

Der folgende Code sollte in die PicoBricks geschrieben werden, mit denen die Hand in der STL-Datei verbunden ist. Mit diesem Code bewegt sich der mit der Hand verbundene Servomotor und führt eine Handbewegung aus.

MicroPython-Codes von PicoBricks
Der folgende Code ist der Code, zu dem PicoBricks „Hallo“ sagt.
von Zeit zu Zeit Schlaf importieren
vom Maschinenimport-Pin
vom Maschinenimport I2C
Von Picobricks importieren Sie SSD1306_I2C
Importmaschine
Importzeit
i2c = I2C(0, scl=Pin(5), sda=Pin(4), freq=200000)
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
pin_button = machine.Pin(10, machine.Pin.IN)
pin = machine.Pin(12, machine.Pin.OUT)
oled.fill(0)
oled.text("{}".format("|PicoBricks|"), 15, 5)
oled.text("{}".format("|Meeting|"), 23, 18)
oled.text("{}".format("----------------"), 0, 30)
oled.text("{}".format("Drücken Sie die Taste"), 0, 45)
oled.text("{}".format("zum Start"), 26, 57)
oled.show()
RelayState = 0
while (pin_button.value()) == (0):
passieren
während True:
if (pin_button.value()) == (1) und RelayState:
oled.fill(0)
oled.text("{}".format("Auf Wiedersehen"), 33, 18)
oled.text("{}".format("PicoBricks :("), 15, 30)
oled.show()
pin.off()
RelayState = 0
elif (pin_button.value()) == (1) und RelayState == (0):
oled.fill(0)
oled.text("{}".format("Hallo"), 35, 18)
oled.text("{}".format("Mein Freund :)"), 15, 30)
oled.show()
Anstecken()
RelayState = 1
time.sleep((0.2))
Der folgende Code sollte in die PicoBricks geschrieben werden, mit denen die Hand in der STL-Datei verbunden ist. Mit diesem Code bewegt sich der mit der Hand verbundene Servomotor und führt eine Handbewegung aus.
von Zeit zu Zeit Schlaf importieren
vom Maschinenimport-Pin
vom Maschinenimport I2C
Von Picobricks importieren Sie SSD1306_I2C
vom Maschinenimport PWM
von Math Import Fabs
Importzeit
i2c = I2C(0, scl=Pin(5), sda=Pin(4), freq=200000)
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
pwm_1 = PWM(Pin(21))
pwm_1.freq(50)
def CalculateAngle(Winkel):
Winkel = Fabs((Winkel * (6000 / 180)) + 2000)
Winkel = rund(Winkel)
Rückkehrwinkel
während True:
oled.text("{}".format("HALLO :)"), 30, 30)
pwm_1.duty_u16(CalculateAngle(60))
time.sleep((0.2))
pwm_1.duty_u16(CalculateAngle(120))
time.sleep((0.2))
Arduino C-Codes von PicoBricks
Der folgende Code ist der Code, zu dem PicoBricks „Hallo“ sagt.
#enthalten
#enthalten
#enthalten
#include „ACROBOTIC_SSD1306.h“
#define PICO_BUTTON 10
#define RELAIS 12
bool state = false;
void setup() {
Serial.begin(115200);
pinMode(PICO_BUTTON,INPUT);
pinMode(RELAY,OUTPUT);
Wire.begin();
oled.init();
oled.clearDisplay();
oled.setTextXY(1,3);
oled.putString("PicoBricks");
oled.setTextXY(3,4);
oled.putString("Treffen");
oled.setTextXY(5,0);
oled.putString("Drücken Sie die Taste");
oled.setTextXY(7,3);
oled.putString("to Start");
}
void loop() {
if(state == false && digitalRead(PICO_BUTTON) == HIGH){
digitalWrite(RELAY,HIGH);
oled.clearDisplay();
oled.setTextXY(3,5);
oled.putString("Hallo");
oled.setTextXY(5,2);
oled.putString("Mein Freund :)");
Zustand = wahr;
Verzögerung(100);
}else if (state == true && digitalRead(PICO_BUTTON) == HIGH){
digitalWrite(Relais,LOW);
oled.clearDisplay();
oled.setTextXY(3,4);
oled.putString("Auf Wiedersehen");
oled.setTextXY(5,2);
oled.putString("PicoBricks :(");
Zustand = falsch;
Verzögerung(100);
}
}
Der folgende Code sollte in die PicoBricks geschrieben werden, mit denen die Hand in der STL-Datei verbunden ist. Mit diesem Code bewegt sich der mit der Hand verbundene Servomotor und führt eine Handbewegung aus.
#enthalten
#enthalten
#enthalten
#include „ACROBOTIC_SSD1306.h“
Servo servo1;
void setup() {
// DHT-Sensor und Oled-Bildschirm definieren
Serial.begin(115200);
servo1.attach(21);
Wire.begin();
oled.init();
oled.clearDisplay();
oled.setTextXY(3,5);
oled.putString("Hallo");
oled.setTextXY(5,3);
oled.putString("PicoBricks");
}
void loop() {
servo1.write(120);
Verzögerung(200);
servo1.write(45);
Verzögerung(200);
}
