



#22 Projet de règle numérique avec PicoBricks
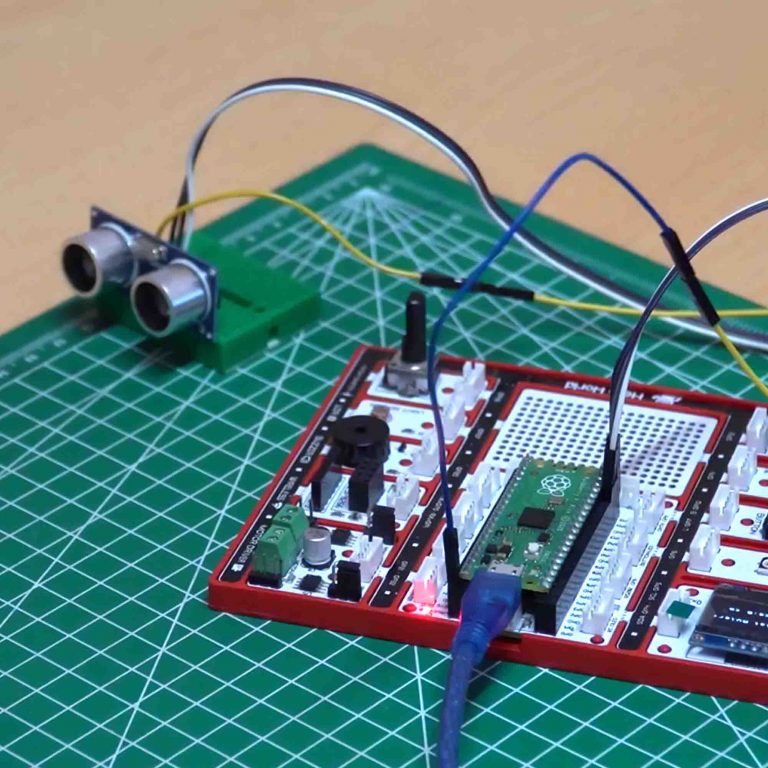
Schéma de câblage

Pour préparer le projet, vous avez besoin de ruban mousse double face, d'un couteau tout usage, d'une poubelle en carton d'environ 15x10x5 cm.
1) Découpez les trous pour le capteur à ultrasons, l'écran OLED, le module bouton LED, avertisseur sonore, boîtier de batterie pour passer les câbles avec un couteau tout usage.

2) Accrochez tous les câbles à l'intérieur du boîtier et fixez l'arrière des modules au boîtier avec du ruban mousse double face. Connectez le trigonométrie broche du capteur à ultrasons sur le GPIO14 la broche et le écho épingler au GPIO15 épingle. Vous devez connecter la broche VCC au VBUS épinglez sur le Picoboard.


Codes MicroBlocks des PicoBricks

Vous pouvez accéder aux codes Microblocks du projet en faisant glisser l'image vers l'onglet Microblocks Run ou en cliquant sur le bouton.
Onglet Exécution des microblocs
Codes MicroPython des PicoBricks
à partir de l'importation de la machine Pin, PWM, I2C
depuis utime importer le sommeil
à partir de picobricks importer SSD1306_I2C
importer du temps
# Définir les bibliothèques
LED rouge = broche (7, broche.OUT)
bouton = Pin(10, Pin.IN, Pin.PULL_DOWN)
buzzer = PWM (Pin (20, Pin.OUT))
buzzer.freq(392)
déclencheur = broche (15, broche.OUT)
écho = Pin(14, Pin.IN)
# Définir les broches d'entrée et de sortie
LARGEUR = 128
HAUTEUR = 64
# Paramètres de l'écran OLED
sda = machine.Pin(4)
scl = machine.Pin(5)
i2c = machine.I2C(0, sda=sda, scl=scl, fréquence=1000000)
# Initialisez les broches numériques 4 et 5 comme SORTIE pour la communication OLED
oled = SSD1306_I2C (128, 64, i2c)
mesure = 0
Distance finale = 0
def getDistance() :
déclencheur.low()
utime.sleep_us(2)
déclencheur.high()
utime.sleep_us(5)
déclencheur.low()
tandis que echo.value() == 0 :
signaloff = utime.ticks_us()
tandis que echo.value() == 1 :
signalon = utime.ticks_us()
temps écoulé = signal activé - signal désactivé
distance = (temps écoulé * 0,0343) / 2
distance de retour
# Calculer la distance
def getMeasure (broche) :
mesure globale
Distance finale globale
rougeLed.value(1)
pour moi dans la plage (20):
mesurer += getDistance()
dormir(0.05)
rougeLed.value(0)
finalDistance = (mesure/20) + 1
oled.fill(0)
oled.show()
oled.text(">Règle numérique<", 2, 5)
oled.text("Distance " + str(round(finalDistance)) + " cm", 0, 32)
oled.show()
# Imprime la distance spécifiée aux coordonnées x et y spécifiées sur l'écran OLED
imprimer (distance finale)
buzzer.duty_u16(4000)
dormir(0.05)
buzzer.duty_u16(0)
mesure = 0
Distance finale = 0
# Faites retentir le buzzer
bouton.irq(trigger=machine.Pin.IRQ_RISING, handler=getMeasure)
Codes Arduino C des PicoBricks
#include
#include "ACROBOTIC_SSD1306.h"
#include
// Définir les bibliothèques
#définir TRIGGER_PIN 15
#définir ECHO_PIN 14
#définir MAX_DISTANCE 400
Sonar NewPing (TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
#définir T_B 493
distance entière = 0 ;
entier total = 0 ;
void setup() {
pinMode(7, SORTIE);
pinMode(20, SORTIE);
pinMode(10, ENTRÉE);
// Définir les broches d'entrée et de sortie
Wire.begin();
oled.init();
oled.clearDisplay();
}
boucle vide() {
retard (50);
si (digitalRead (10) == 1) {
mesure int = 0 ;
digitalWrite(7, ÉLEVÉ);
ton(20, T_B);
retard (500);
pas de tonalité (20);
pour (int je = 0; je < 20; i++) {
mesure = sonar.ping_cm();
total = total + mesure ;
retard (50);
}
distance = total / 20 + 6 ; // Calculer la distance
digitalWrite(7, FAIBLE);
retard (1000);
oled.clearDisplay();
oled.setTextXY(2, 1);
oled.putString(">Règle numérique<");
oled.setTextXY(5, 1);
oled.putString("Distance : ");
oled.setTextXY(5, 10);
Chaîne string_distance = Chaîne (distance);
oled.putString(string_distance);
oled.setTextXY(5, 12);
oled.putString("cm"); // Imprimer la distance calculée sur l'écran OLED
mesure = 0 ;
distance = 0 ;
total = 0 ;
}
}
Page du projet GitHub
