



Count-Up-Projekt
Inhaltsverzeichnis
Hey, hast du es schon einmal versucht? DIY-Elektronik? Es ist wie ein Spielplatz, auf dem Sie Ihrer Kreativität freien Lauf lassen können. Und ich sage Ihnen: Die coolsten Projekte sind diejenigen, die einem einfach in den Sinn kommen. Heute beschäftigen wir uns mit etwas wirklich Aufregendem: dem Servomotor. Es sieht vielleicht nicht nach viel aus, aber dieses kleine Gerät kann einiges leisten und eine ganz neue Welt voller Möglichkeiten eröffnen. Mit dem DIY-Elektronikbausatz B. der Picobricks-Plattform und einem zuverlässigen Servomotor, sind Sie bereit, einige wirklich geniale Dinge zu erstellen, beginnend mit Ihrem ganz eigenen Timer. Egal, ob Sie eine Spieluhr oder eine Präzisions-Stoppuhr herstellen möchten, dieses dynamische Duo steht Ihnen zur Seite und kann Ihre Vision in die Realität umsetzen. Also, lasst uns einsteigen und uns gemeinsam auf diese fantastische Reise begeben!
Count-Up-Timer
A Count-up-Timer ist eine Art Timer, der normalerweise die verstrichene Zeit seit Beginn eines Ereignisses oder Prozesses zählt. Es zeigt die verstrichene Zeit in Sekunden, Minuten, Stunden oder größeren Zeitintervallen an. Beispielsweise lässt sich damit die verstrichene Zeit einer Sportveranstaltung verfolgen oder die Fertigstellungszeit eines Projekts messen. Diese Art von Timer verwendet einen kontinuierlich steigenden Zähler vom Startpunkt an, um anzuzeigen, wie viel Zeit vergangen ist.
Details und Algorithmus
Mithilfe eines Servomotors können Sie von 0 bis 60 Sekunden zählen. Der Pfeil auf dem Servo bewegt sich jede Sekunde um 3 Grad. Es eignet sich perfekt für die Herstellung einer Spiel- oder Stoppuhr. Schlagen Sie einfach auf Taste um den Timer zu stoppen. Und wenn Sie es nach oben und unten statt nach oben zählen möchten, nehmen Sie einfach eine kleine Änderung vor. Wenn Sie versuchen möchten, den Bereichsblock von -90 auf 90 auf 90 auf -90 umzudrehen, bewegt sich der Pfeil in die andere Richtung.
Komponenten
Schaltplan

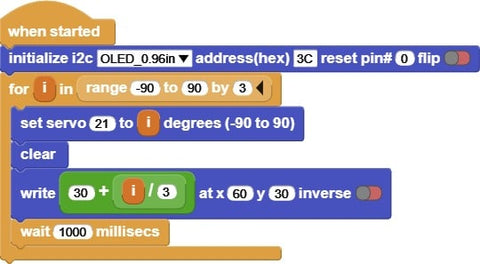
MicroBlocks-Code des Count Up
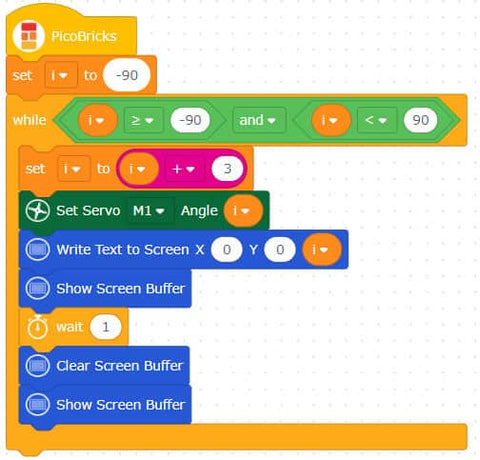
PicoBricks-Code des Count Up
von Zeit zu Zeit Schlaf importieren
vom Maschinenimport-Pin
vom Maschinenimport PWM
von Math Import Fabs
vom Maschinenimport I2C
Von Picobricks importieren Sie SSD1306_I2C
Importzeit
pwm_1 = PWM(Pin(21))
pwm_1.freq(50)
def CalculateAngle(Winkel):
Winkel = Fabs((Winkel * (6000 / 180)) + 2000)
Winkel = rund(Winkel)
Rückkehrwinkel
i2c = I2C(0, scl=Pin(5), sda=Pin(4), freq=200000)
oled = SSD1306_I2C(128, 64, i2c, addr=0x3c)
ich = -90
während i >= (-90) und i < (90):
ich = ich + (3)
pwm_1.duty_u16(CalculateAngle(i))
oled.text("{}".format(i), 0, 0)
oled.show()
time.sleep((1))
oled.fill(0)
oled.show()
#enthalten
#enthalten
#include „ACROBOTIC_SSD1306.h“
#define BUTTON_PIN 10
Servo-Servo;
void setup() {
pinMode(BUTTON_PIN, INPUT);
Wire.begin(); // SDA, SCL
servo.attach(21);
oled.init();
oled.clearDisplay();
Serial.begin(9600);
}
void loop() {
for(int i=-90;i>=-90 && i<=90; i+=3 ){
if(digitalRead(BUTTON_PIN)==1){
brechen;}
oled.clearDisplay();
oled.setTextXY(4, 7);
oled.putString(String(30+ i/3));
servo.write(i);
Verzögerung (1000);
}
}
